Суть линейного предсказания в нахождении коэффициентов ak (k=1..p) для формулы:
p
x[n] =
∑
(ak x[n-k])
(1)
k=1
и последующем использовании этой формулы. Другими словами мы должны построить линейный многочлен, позволяющий с хорошей точностью вычислять значение любого отсчета в сигнале по значениям предыдущих p отсчетов. Коэффициенты ak и называются коэффициентами линейного предсказания.
Фактически, имея некоторый сигнал, мы имеем статистическую выборку которую можно представить в виде таблицы:
х[n-p]
х[n-p+1]
х[n-p+2]
. . .
х[n-1]
х[n]
х[0]
х[1]
х[2]
. . .
x[p-1]
x[p]
х[1]
х[2]
х[3]
. . .
x[p]
x[p+1]
х[2]
х[3]
х[4]
. . .
x[p+1]
x[p+2]
. . .
. . .
. . .
. . .
. . .
. . .
. . .
. . .
. . .
. . .
. . .
. . .
х[N-p-1]
х[N-p]
х[N-p+1]
. . .
x[N-2]
x[N-1]
То есть нахождение коэффициентов линейного предсказания сводится к вычислению коэффициентов линейной регрессии для данной статистической выборки и мы можем пользоваться методами математической статистики.
Минимизируем сумму квадратов ошибок для каждого из вычисляемых отсчетов. Ошибка для отсчета x[n] равна
p
δ[n] = x[n] —
∑
(ak x[n-k])
(2)
k=1
А минимизируемая функция равна
N-1
N-1
p
N-1
N-1
p
E =
∑
δ 2 [n] =
∑
x[n] —
∑
(ak x[n-k])) 2 =
∑
x 2 [n] — 2
∑
x[n]
∑
(ak x[n-k]) )+
n=0
n=0
k=1
n=0
n=0
k=1
N-1
p
N-1
p
N-1
+
∑
(
∑
(ak x[n-k])) 2 =
∑
x 2 [n] — 2
∑
(ak
∑
(x[n] x[n-k])) +
n=0
k=1
n=0
k=1
n=0
p
p
N-1
+
∑
∑
ak aj
∑
(x[n-k]x[n-j]))
(3)
j-1
k=1
n=0
Продифференцируем E по ak и приравняем частные производные нулю для нахождения экстремума:
N-1
p
N-1
dE/dak =
∑
(x[n] x[n-k])) +
∑
aj
∑
(x[n-k]x[n-j]))=0
(4)
n=0
j=1
n=0
Заменив для удобства восприятия j на i, а k на j получим систему p линейных уравнений c p неизвестными :
p
∑
aicij=c0j
(5.1)
i=1
N-1
cij=cji=
∑
x[n-i]x[n-j])
(5.2)
n=0
Эта система называется системой уравнений Юла-Уокера. Погрешность найденных коэффициентов оценивается как:
p
p
p
p
E = c00-2
∑
aic0i+
∑
ai
∑
ajcij = c00 —
∑
aic0i
(6)
i=1
i=1
j=1
i=1
Есть два основных подхода для решения системы уравнений Юла-Уокера.
Источник
Коэффициенты линейного предсказания (получение и расчет)
Формирование сигнала ошибки при использовании линейного предсказания эквивалентно прохождению исходного сигнала через линейный цифровой фильтр. Этот фильтр называется фильтром сигнала ошибки (ФСО) или обратным фильтром.
Обозначим передаточную функцию такого фильтра как А(z):
,
где E(z) и X(z) – прямое z — преобразование от сигнала ошибки и входного сигнала соответственно.
На приемной стороне при прохождении сигнала ошибки через формирующий фильтр (ФФ) мы в идеале получим исходный сигнал. Обозначим передаточную функцию формирующего фильтра как K(z).
Т.е. передаточная функция K(z) связана с A(z) следующим соотношением:
.
Рассмотрим последовательно соединенные кодер и декодер:
При условии, что A(z)K(z) = 1, будет обеспечено абсолютно точное восстановление сигнала, т.е. . Но это в идеале, на самом деле такого быть не может по причинам, о которых скажем ниже.
Для примера, найдем передаточные функции ФСО и ФФ для разных типов линейного предсказания.
а) предсказание нулевого порядка;
; ;
Получили, что такой фильтр неустойчив (граница устойчивости), так как полюс находится на единичной окружности.
б) предсказание первого порядка;
; ;
Получили, что и такой фильтр тоже неустойчив (граница устойчивости).
в) общая форма предсказания;
Было получено, что => .
; ;
На основании рассмотренных примеров можно сделать следующие выводы.
Фильтр сигнала ошибки всегда является КИХ фильтром, а формирующий фильтр – БИХ фильтром. Коэффициенты передаточной функции ФФ, которые, как уже было сказано выше, являются коэффициентами линейного предсказания (LPC: Linear Prediction Coefficients), должны быть такими, чтобы:
1. формирующий фильтр был устойчивым;
2. ошибка была минимальна.
Для получения передаточной функции ФФ, наиболее точно воспроизводящего частотную характеристику голосового тракта для данного звука, следует определять коэффициенты передаточной функции исходя из условия наименьшей ошибки линейного предсказания речевого сигнала (по условию минимума среднего квадрата ошибки).
Запишем выражение для оценки дисперсии сигнала ошибки, которую надо свести к минимуму:
; ;
Получили, что — функция нескольких переменных. Продифференцируем ее и приравняем частные производные для нахождения экстремума:
; ,
где — символ Кронекера. Следовательно: ;
; => ;
Получили нормальные уравнения или уравнения Юла-Волкера. Введем обозначение: , где — есть ни что иное, как корреляционная функция. Перепишем полученное выражение с учетом принятого обозначения:
(*)
Для вычисления функции необходимо определить пределы суммирования по n: , где N – количество отсчетов в сегменте РС, а M — количество отсчетов, необходимых для расчета коэффициентов предсказания (M + 1)-го отсчета. Значит, первое предсказанное значение запишется так: , где n = M + 1.
;
Таким образом, получается выражение, имеющее структуру кратковременной ненормированной АКФ, но зависящей не только от относительного сдвига последовательности i, но и от положения этих последовательностей внутри сегмента РС, которые определяются индексом k, входящим в пределы суммирования. Такой метод определения функции называется ковариационным.
Выражение (*) представляет собой систему линейных алгебраических уравнений (СЛАУ) относительно , у которых все коэффициенты различны.
При использовании ковариационного метода получаются несмещенные оценки коэффициентов линейного предсказания, то есть E<ak>= ak.ист, где ak.ист – истинные значения коэффициентов линейного предсказания.
Другой способ определения коэффициентов системы (*) состоит в том, что вместо функции используется некоторая другая функция , которая определяется как
,
где — ненормированная кратковременная АКФ. Поскольку определение функции сводится к расчету АКФ, то такой метод называется автокорреляционным. При использовании этого метода мы получаем смещенные оценки коэффициентов линейного предсказания (однако, при M
Распишем полученную систему линейных алгебраических уравнений (СЛАУ) в явном виде:
Перепишем ее в матричной форме:
;
Свойства матрицы коэффициентов системы:
1) матрица симметрична;
2) матрица Теплица (матрица, в пределах каждой диагонали которой все элементы равны);
Для решения СЛАУ с такой матрицей используется алгоритм Левинсона – Дурбина, который требует меньших вычислительных затрат, чем стандартные алгоритмы. Он выглядит следующим образом.
Источник
Анализ речи на основе линейного предсказания
Анализ речи на основе линейного предсказания базируется на использовании модели речевого сигнала, представленной на рис.4.1, Основная задача метода состоит в том, чтобы по наблюдениям последовательности отсчетов речевого сигнала s[n] определить коэффициенты a[k] цифрового фильтра указанной модели [14,15,17].
Найденные значения коэффициентов, которые называют коэффициентами линейного предиктивного кодирования (ЛПК), могут применяться при определении частоты основного тона, при кодировании речи в соответствии с АДИКМ, в задачах распознавания и синтеза речи.
Главное допущение метода линейного предсказания состоит в том, что речевой отсчет на выходе голосового тракта s[n] может быть предсказан по линейной комбинации своих предыдущих значений и значению сигнала и [п]
где G — коэффициент усиления; Р — порядок линейного предсказателя. Е этом случае передаточная функция предсказателя соответствует передаточной функции рекурсивного фильтра
Определение коэффициентов линейного предсказания речи имеет прямое отношение к спектральному анализу, основанному на использовании АР-модели. Вместе с тем, использование модели, приведенной на рис.4.1, вносит некоторую специфику. Поэтому рассмотрим оценивание ЛПК речи подробнее. Так как отсчеты возбуждающей последовательности и[п] неизвестны, то последовательность s[n] может быть предсказана только по своим предыдущим значениям
Ошибка предсказания в этом случае будет равна
Определим коэффициенты a[k] таким образом, чтобы сумма квадратов ошибок предсказания была минимальна
Для минимизации (4.28) найдем частные производные (4.28) по a[k] и приравняем их к нулю
В результате получим систему уравнений
где a[k] -оценки коэффициентов a[k].
В общем случае суммирование в (4.30) должно выполняться по всем значениям п. Однако на практике суммирование по я в уравнении (4.30) выполняют для ограниченного числа отсчетов s[n], чтобы соблюдалось условие стационарности s[n]. Для этого ограничивают последовательность s[n] с помощью окна w[n]
Тогда систему уравнений (4.30) можно переписать в виде
автокорреляционная функция ограниченной последовательности s'[n].
Так как автокорреляционная функция является четной, т.е. г[от]=г[-/п],
то (4.32) можно записать в матричной форме ;
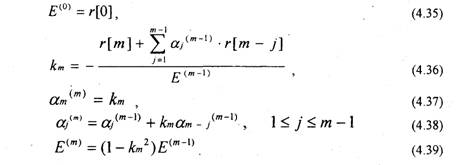
Матричное уравнение (4.34) имеет структуру аналогичную уравнению (2.35) и может быть решено с помощью рекурсивного алгоритма Левинсона — Дарбина. В соответствии с этим алгоритмом решение для предсказателя т-го порядка получается на основе решения для предсказателя т-\ порядка. Формально алгоритм определяется следующими соотношениями 4,14,15,171:
Уравнения (4.35 — 4.39) решаются рекурсивно для т=1, 2, . Р: Отметим, что для от=1 параметр а^ = k\ = r[l]/r[0] и. Е^ = (1 — k^)r[0]. Для конечного решения порядка Р коэффициенты линейного предсказания будут равны
Коэффициенты km называются коэффициентами отражения. Е представляет сумму квадратов ошибки предсказания для предсказателя т-го порядка. Автокорреляционную функцию последовательности s'[n] оценивают на основе соотношения:
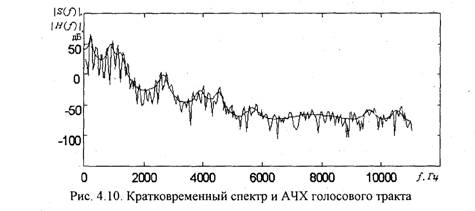
Линейное предсказание речи можно использовать для определения частотной характеристики голосового тракта
Данная характеристика соответствует медленно меняющейся составляющей кратковременного спектра речевого сигнала. На рис. 4.10 представлен кратковременный спектр речевого сигнала и АЧХ голосового тракта, вычисленная с помощью (4.42). Порядок фильтра Р=28. На графике АЧХ хорошо представлены форманты.
Недостатком рассмотренного метода определения ЛПК является необходимость вычисления матрицы автокорреляций. Кроме этого, если вычисленные значения ЛПК применяются при синтезе речи в соответствии со схемой, показанной на рис.4.1, то возникают вопросы обеспечения устойчивости цифрового рекурсивного фильтра высокого порядка.
В настоящее время развит класс методов, которые оценивают ЛПК непосредственно по отсчетам последовательности s[n] и которые лучше приспособлены для решения задач синтеза речи. Эти методы базируются на использовании лестничного фильтра [17].
Эта передаточная функция соответствует инверсному фильтру и являете» ‘^j обратной по отношению к передаточной функции предсказателя (4.25). Е ‘ соответствии с (4.27) на вход инверсного фильтра поступает речевой сигнал s[n], а на выходе формируется ошибка предсказания. Ошибка предсказания;
для предсказателя т-го порядка будет равна
Найдем z-преобразование (4.44). Тогда
Подставив (4.38) в (4.43), получим
Отсюда получаем рекурсивное выражение для вычисления A»»‘\z)
Подставляя (4.47) в (4.45), получаем выражение для ошибки предсказания
Первый член в (4.48) соответствует ошибке предсказания для предсказателя (т-1 )-го порядка. Для второго члена в (4.48) без km введем обозначение
Выражению (4.49) соответствует разностное уравнение
Данное уравнение соответствует обратному предсказанию, т.е. оно позволяет предсказать отсчет по предстоящим отсчетам s[(n-m)+k] и (рис.4.11).
Сравнивая (4.50) и (4.44), отмечаем, что b»‘[n] соответствует ошибке обратного предсказания. Таким образом, ошибка прямого предсказания (4.48) может быть представлена в виде
Выполнив аналогичные преобразования для (4.50), получим симметричное выражение для ошибки обратного предсказания
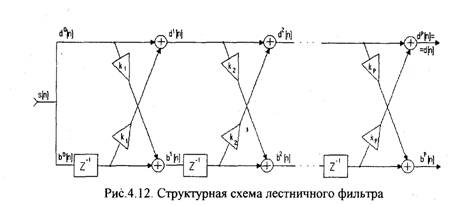
Уравнения (4.51) и (4.52) являются рекуррентными и определяют ошибки предсказаний для предсказателя т-го порядка через ошибки предсказания для предсказателя (m-l)-ro порядка. При этом для предсказателя нулевого порядка
Уравнения (4.51) и (4.52) соответствуют лестничному фильтру и могут быть представлены в виде структурной схемы, изображенной на рис.4.12.
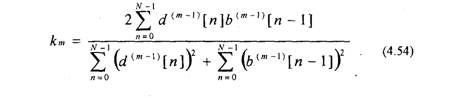
Коэффициенты отражения km могут вычисляться в соответствии с уравнениями (4.35 — 4.39). Однако имеется и иная возможность. В [11,36] показано, что коэффициенты отражений можно вычислять через ошибки предсказания d»[n\ и &»*[«] в соответствии с соотношением
Выражение (4.54) является нормированной корреляционной зависимостью и показывает степень корреляции между ошибкой прямого предсказания и ошибкой обратного предсказания. Поэтому коэффициенты km иногда называют коэффициентами частной корреляции. Уравнение (4.54) может использоваться вместо уравнения (4.36) при оценивании коэффициентов линейного предсказания.
Оценки коэффициентов km лестничного фильтра, вычисленные с помощью (4.54), будут находиться в диапазоне —1 r и Г — задержка, соответствующая периоду основного тона, равная 20-150 интервалам дискретизации. Если на вход фильтра долговременного предсказания подать сигнал ошибки кратковременного предсказания (/л-М, то в соответствии с (4.55) ошибка долговременного предсказания d ;[п] будет равна
Данная ошибка по своим свойствам близка к белому шуму с нормальным законом распределения. Это упрощает формирование сигнала возбуждения, так как при синтезе последовательности s[n> ошибка долговременного предсказания выступает в роли сигнала возбуждения.
Фильтр с передаточной функцией W(z) (рис. 4.14) позволяет учесть особенности слухового восприятия человека. Для человека шум наименее заметен в частотных полосах сигнала с большими значениями спектральной плотности. Этот эффект называют маскировкой (см. §4.8). Фильтр W(z) , учитывает эффект маскировки и придает ошибке восстановления различный вес в разных частотных диапазонах. Вес выбирается так, чтобы ошибка восстановления маскировалась в полосах речевого сигнала с высокой энергией.
Принцип работы схемы, изображенной на рис.4.14, состоит в выборе функции возбуждения (ФВ), минимизирующей квадрат ошибки (МКО) восстановления.
Существует несколько различных способов формирования функции возбуждения: многоимпульсное, регулярно-импульсное и векторное (кодовое) возбуждение [36]. Соответствующие алгоритмы представляют многоимпульсное (MLPC), регулярно-импульсное (RPE-LPC) и линейное предсказание с кодовым возбуждением (code excited linear prediction — CELP). MLPC использует функцию возбуждения, состоящую из множества нерегулярных импульсов, положение и амплитуда которых выбирается так, чтобы минимизировать ошибку восстановления. Алгоритм RPE-LPC является разновидностью MLPC, когда импульсы имеют регулярную расстановку. В этом случае оптимизируется амплитуда и относительное положение всей последовательности импульсов в пределах сегмента речи. CELP представляет способ, который основывается на векторном квантовании. В соответствии с этим способом из кодовой книги возбуждающих последовательностей выбирается квазислучайный вектор, который минимизирует квадрат ошибки восстановления. Кодовая книга используется как на этапе сжатия речевого сигнала, так и на этапе его восстановления. Для восстановления сегмента речевого сигнала необходимо знать номер соответствующего вектора воз-бужденияг в кодовой книге, параметры фильтров Ai,(z) и A(z), коэффициент усиления. Восстановление речевого сигнала по указанным параметрам выполняется в декодере только с помощью элементов, входящих в верхнюю часть схемы, изображенной на рис.4.14.
В настоящее время применяется несколько стандартов, основывающихся на рассмотренной схеме сжатия:
1) RPE-LPC со скоростью передачи 13 Кбит/с используется в качестве стандарта мобильной связи в Европейских странах;
2) CELP со скоростью передачи 4,8 Кбит/с. Одобрен в США федеральным стандартом FS-1016. Используется в системах скрытой телефонной связи;
3) VCELP со скоростью передачи 7,95 Кбит/с (vector sum excited linear prediction). Используется в цифровых сотовых системах в Северной Америке. VCELP со скоростью передачи 6,7 Кбит/с принят в качестве стандарта в сотовых сетях Японии;
4) LD-CELP (low-delay CELP) одобрен стандартом МККТТ G.728. В данном стандарте достигается небольшая задержка примерно 0,625 мс (обычно методы CELP имеют задержку 40-60 мс), используются короткие векторы возбуждения и не применяется фильтр долговременного предсказания с передаточной функцией Ai,(z).
Необходимо отметить, что рассмотренные методы сжатия речи, использующие линейное предсказание с кодовым возбуждением, хорошо приспособлены для работы с речевыми сигналами в среде без шумов. В случае шумового воздействия на речевые сигналы синтезированная речь имеет плохое качество. Поэтому в настоящее время разрабатывается ряд методов линейного предсказания с кодовым возбуждением для использования в шумовой обстановке (ACELP, CS-CELP),

 ,
, .
.
 . Но это в идеале, на самом деле такого быть не может по причинам, о которых скажем ниже.
. Но это в идеале, на самом деле такого быть не может по причинам, о которых скажем ниже. ;
;  ;
; ;
;  ;
; =>
=>  .
. ;
;  ;
; была минимальна.
была минимальна. исходя из условия наименьшей ошибки линейного предсказания речевого сигнала (по условию минимума среднего квадрата ошибки).
исходя из условия наименьшей ошибки линейного предсказания речевого сигнала (по условию минимума среднего квадрата ошибки). ;
;  ;
; — функция нескольких переменных. Продифференцируем ее и приравняем частные производные для нахождения экстремума:
— функция нескольких переменных. Продифференцируем ее и приравняем частные производные для нахождения экстремума: ;
;  ,
, — символ Кронекера. Следовательно:
— символ Кронекера. Следовательно:  ;
; ; =>
; =>  ;
;
 , где
, где  — есть ни что иное, как корреляционная функция. Перепишем полученное выражение с учетом принятого обозначения:
— есть ни что иное, как корреляционная функция. Перепишем полученное выражение с учетом принятого обозначения: (*)
(*) , где N – количество отсчетов в сегменте РС, а M — количество отсчетов, необходимых для расчета коэффициентов предсказания (M + 1)-го отсчета. Значит, первое предсказанное значение запишется так:
, где N – количество отсчетов в сегменте РС, а M — количество отсчетов, необходимых для расчета коэффициентов предсказания (M + 1)-го отсчета. Значит, первое предсказанное значение запишется так:  , где n = M + 1.
, где n = M + 1. ;
;
 , которая определяется как
, которая определяется как ,
, — ненормированная кратковременная АКФ. Поскольку определение функции
— ненормированная кратковременная АКФ. Поскольку определение функции 
 ;
;